
工业机器人







BOH-RP01工业机器人综合仿真视觉实训台
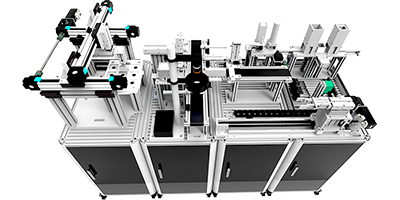
工业机器人综合实训台是模块化工业机器人实训工作站,台面各工作单元均为模块化结构设计,可灵活自由拆装。工作站覆盖了工业机器人应用技术、互联控制技术、传动技术、人机交互(HMI)技术、视觉检测技术、机械技术、传感与气动技术及多种工业现场总线通讯技术等多种技术应用。其中,互联控制、人机交互(HMI)技术载体标配国内外一线品牌,其保证了工业机器人综合实训台在系统教学过程的稳定性与可靠性。
品牌:博恒BHENLAB
制造商:浙江博恒教学设备有限公司
产地:浙江
定制:可定制(包含外观、参数、配置)
质保期:一年(非人为故意、暴力损坏)
价格:联系销售人员
分类:
货号:
BOH-RP01
分享
相关产品

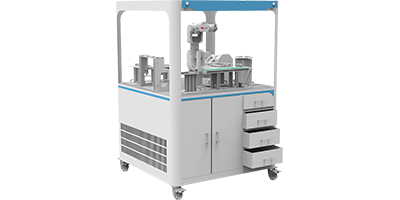
该套系统设备主要由工业互联网平台、颗料填装单元、加盖拧盖单元、检测分拣单元、加工包装单元、智能物流单元、系统看板、服务器等组成,涵盖了工业网关、三层管理交换机、工业防火墙、工业级双频无线接入点、工业级双频无线客户端、工业交换机、RFID识别、智能阀岛、远程IO、工业传感器、工业视觉等网络设备和产线虚拟仿真应用场景等。
品牌:博恒BHENLAB
制造商:浙江博恒教学设备有限公司
产地:浙江
定制:可定制(包含外观、参数、配置)
质保期:一年(非人为故意、暴力损坏)
价格:联系销售人员

技术指标
1、实验电路工作电源:+5V/2A一组、±12V/0.7A一组、1.5~9V(或任意值)可调一组,每路设置保险丝一个,每路均带有短路保护和反向保护电路,其中+5V电源有过压保护、欠压保护和短路报警和自动关断功能,确保实验电路元件和人身安全。
2、常用信号源
1)提供二组正负单脉冲发生电路,带电平指示。
2)1HZ~1KHZ连续可调时钟电路。
3)1HZ~1MHZ固定脉冲分7路输出,其中1HZ带指示灯显示。
4)12路开关量输入显示电路,输入端带保护功能。
5)12路开关量输出电路,输出端自带显示电路,直观显示开关量的输出状态,同时输出端带保护功能。
6)6位七段LED共阳数码显示器,自带BCD码译码电路;2位独立数码管,可装共阳或共阴数码管。
7)2组BCD码拨盘开关输出电路,输出端带保护功能。
8)由555时基电路组成的音响输出控制电路,并带有蜂鸣器和喇叭输出设备。
3、测试小工具
1)提供三状态数字逻辑测试电路,并有声光提示。2) 提供0~20直流电压测量表1个(可选配)。
3)提供0~50MHZ频率计1个(可选配)。
4、实验电路区: 独立电路板设计,和实验信号源完全隔离,防止实验电路区接线时的误操作损坏主机箱。实验电路区配置如下:
1)配置开放式实验区,含圆孔2只IC8,锁紧或圆孔12只IC14、6只IC16或4只(可以再扩展3只)、1只IC20、1只IC40锁紧插座(兼容IC28/IC24/IC18等)。
2)提供8Ω喇叭、蜂鸣器和1×2开关各1个、电位器3个(可选配)。
3)设计有导线测试座一组。
4)还设有多个高可靠锁紧式防转叠插座(与集成块插座、镀银长紫铜管及固定器件等已内部连好)作为实验连接点、测试点,实验接线时,只要拿锁紧插头线相互连接即可。
5)2个扩展模块电路接入区:尺寸各为155×100mm,可选配固定线路实验模块。学生可以进行创新性练习,以提高学生的思维能力和动手能力。
技术指标
1、工作电源
1)输入:AC220V±10%,50HZ。
2)输出:(1)ACV 0V、14V、16V、18V和带中心抽头双路7.5V低压交流电源(AC50Hz)。
有短路保护功能。
(2)DCV ±1.5V~±15V连续可调,有短路保护自动恢复功能。
(3)DCV ±12V/0.5A, 5V/0.5A,有短路保护自动恢复功能。
3)完善的电源保护电路:过流保护、过压保护、接反保护。
2、信号源
1)直流信号源:双路-5V~+5V, -0.5V~+0.5V连续可调。
2)函数发生器
输出波形:方波、三角波、正弦波
幅值:正弦波:0~10V(10V为峰—峰值,且正负对称)
三角波:0~20V(20V为峰—峰值,且正负对称)
方波:0~20V(20V为峰—峰值,且正负对称)
频率范围:分四档10HZ~100HZ、100HZ~1KHZ、1KHZ~10KHZ、10KHZ~100KHZ。
3、单级放大电路
4、二级放大电路
5、射极跟随器电路
6、差动放大电路
7、负反馈放大电路
8、半波、全波、桥式整流和滤波电路
9、并联稳压电路
10、集成功率放大电路
11、互补对称功率放大电路
13、2组运算放大器电路
14、分立元件区:设计有1个8Ω扬声器、1个桥堆、1个单结晶体管BT33、1个470uF和0.1uF电容、4个5.1V稳压管、1个三极管接插做、1个集成稳压管接插座、1个1W/51电阻、1个51K电阻,另有二极管、电容、电阻、三极管等分立元件接入区,用镀银长紫铜管做插孔,可以满足大小不同的管脚的接插。
15、指针式直流毫安表1只,量程为1mA,内阻为100Ω。
16、实验板采用2mm厚印制线路板制成。
17、采用高可靠自锁紧防转叠插座作为实验连接点。
18、可以根据需要,另行开发其它实验电路。
19、机箱:坚固型铝合金框架,厚实的 ABS 塑料包角,参考外形尺寸 480×360×120mm。

1、输入电压:单相三线~220V±10% 50Hz
2、装置容量:<1kVA
3、工作环境:温度-10℃~+40℃相对湿度<85%(25℃)
4、装置容量:<500VA
5、外形尺寸:实训台尺寸为1.6m×0.75m×1.35m。
产品结构:
装置由仪器架、主机箱、整室电源智能管理箱、实验桌、学生凳等组成。实验装置支架与实验桌可组合、可拆装。支架与桌脚一体,铝合金结构。
(一)仪器架:仪器架置于实训台顶部,由截面尺寸:90mm×90mm,高性能表面氧化的铝型材、双面喷塑钢板及一次成型铝压铸框架连接构件构成(非焊接工艺),外形美观,结构牢固耐用。仪器架底部装有2套隐藏式扁平形照明LED灯,2套照明LED灯每工位独立控制。光源集中柔和明亮,外形美观。
(二)电源主机箱:在主机箱顶部每工位内嵌4路AC220V输出,漏电保护开关,电源控制箱置于仪器架下部,仪器仪表电用安全方便。并装有LED灯控制开关。
(三)实训桌结构:
实训桌规格为1600(长)*750(宽)*1350(高),设有二个抽屉;实验桌主体结构全部采用高性能表面氧化的铝型材及一次成型铝压铸框架连接构件,连接构件采用压铸成型工艺(非焊接工艺),经机加工、抛丸、喷砂,表面静电喷涂工艺,安装方便、快捷,用户可自行DIY组装。桌体立柱采用工业铝型材成型工艺,表面氧化处理,截面尺寸:90mm×90mm,四面带槽,槽宽约8mm,端部装有注塑成型配套塑料堵头。桌面采用25mm三聚氰胺饰面板,配有一块防静电绝缘皮。贴桌面板下设支撑框架,承受力不少于200kg。实训装置整体简约不简单,高端大气,符合现代化产品审美和发展趋势。
实验桌后面二支截面尺寸90mm×90mm桌脚向上延伸,与一次成型铝压铸框架连接构件构成(非焊接工艺)牢固的支架,与仪器架、电源控制箱组成一个完整的实训屏。
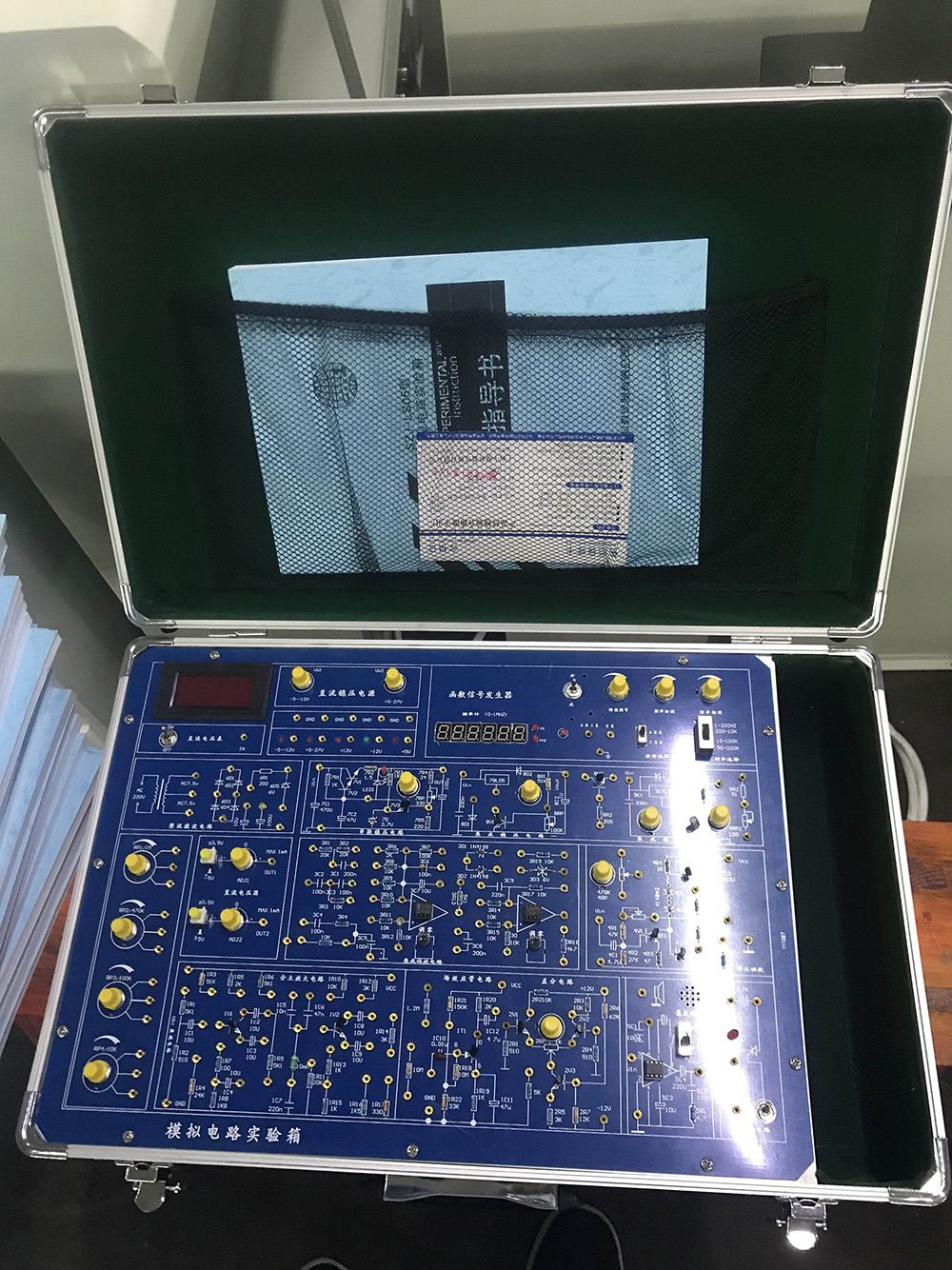
BOH-MNDL型模拟电路实验箱将所有实验模块分类集中分布于线路板上,由锁紧式插孔将引线引出,学生可按照各实验项目自已动手搭建电路,有 利于培养学生的思维能力及动手能力,也增强了该实验箱的适用性。
品牌:博恒BHENLAB
制造商:浙江博恒教学设备有限公司
产地:浙江
定制:可定制(包含外观、参数、配置)
质保期:一年(非人为故意、暴力损坏)
价格:联系销售人员
办公地址:浙江省温州市永嘉县桥下镇新纵教玩具孵化园8栋3单元
销售咨询:13732023530、15858864466、19975218786、13345876015
技术咨询:15058335858
联系电话:4008-269-589、0577-66961670
公司邮箱:bh@boheng.com.cn
工业机器人综合实训台
一、实训装置介绍
工业机器人综合实训台是模块化工业机器人实训工作站,台面各工作单元均为模块化结构设计,可灵活自由拆装。工作站覆盖了工业机器人应用技术、互联控制技术、传动技术、人机交互(HMI)技术、视觉检测技术、机械技术、传感与气动技术及多种工业现场总线通讯技术等多种技术应用。其中,互联控制、人机交互(HMI)技术载体标配国内外一线品牌,其保证了工业机器人综合实训台在系统教学过程的稳定性与可靠性。
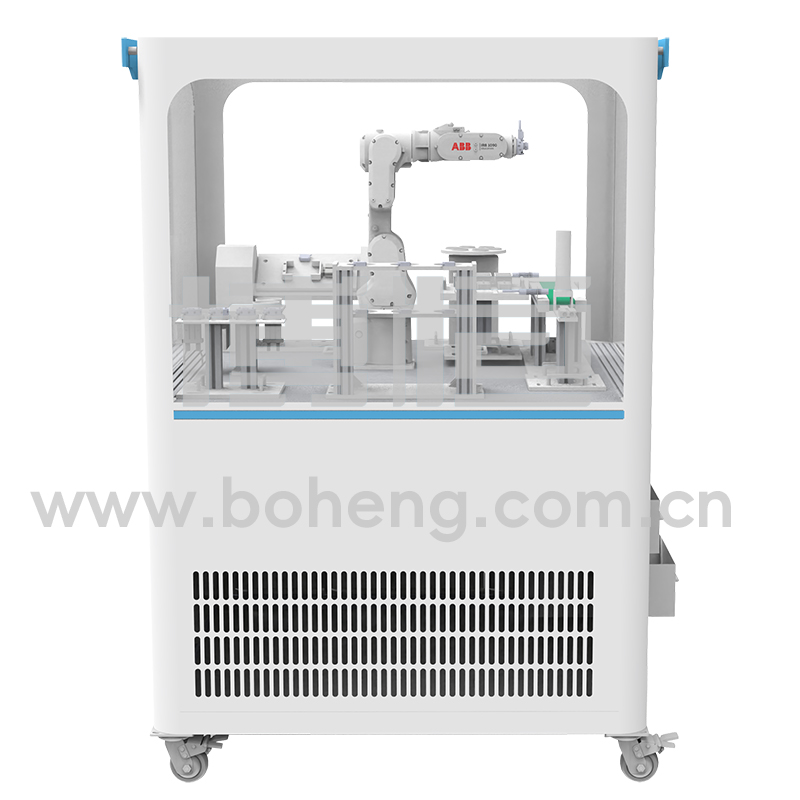
图1 工业机器人综合实训台正面侧视模型图
工业机器人综合实训台由多种类型工作单元组合而成,包含工业机器人控制单元、旋转供料单元、上下料控制单元、夹具快换单元、输送单元、视觉检测单元、物料中转单元、智能仓储单元、人机交互单元、信息写入/读取单元、绘图单元等多种实训单元。且该实训台既可某一方面功能控制进行针对性实训;亦可自行根据需求,选择多种工作单元搭建产线,进行综合实训。通过该实训台可培养学生智能控制工艺分析、工作站设计、工作站仿真与编程、工作安装与调试、智能工作站虚拟仿真、编程、设计等能力。
图2 工业机器人综合实训台分布图
技术参数:
1、输入电源:单相三线制~220V±10% 50Hz
2、温度:-5℃~+40℃,相对湿度<85%(25℃)
3、设备功率:<3.0 kw
4、外形尺寸:长×宽×高:1200mm×1200mm×1600mm
二、实训单元介绍
1、供料工作站
图3 井式供料单元
主要由固定底板、不锈钢拉手、支撑架、安装板、气缸、推杆、有机材质料筒等组成,整体采用铝合金材质。用于储存待装配物料,可通过PLC控制器对该模块进行控制,实现待装配物料的自动出库作业,该模块与输送单元配合使用。
工作流程: 系统复位→料仓检测到内有物料→系统启动 →PLC 发出指令→气缸顶出→将物料推送到“输送单元”上,完成物料出库动作。
2、输送单元
主要由固定底板、不锈钢拉手、支撑架、皮带、轴承、主动轮、从动轮、驱动电机(直流、交流、步进、伺服多种驱动方式可选)、旋转编码器、光电开关、导流板等组成。整体采用铝合金和不锈钢材质,用于井式供料出库模型的输送。可通过 PLC 控制器对该单元进行控制,实现物料的自动运输作业,该模块与井式供料单元、视觉检测单元配合使用。
3、视觉检测单元
由固定底板、光轴、连接块、相机安装板、光源安装板、相机、镜头、光源、线缆、视觉控制器(内置视觉系统软件)等组成。主要进行机器视觉分拣应用实训,可自动检测工件的位置、尺寸、外观瑕疵等信息,经过软件比对处理后,通过 TCP/IP 通讯协议把比对结果传递给控制器,工业机器人使用末端吸盘夹具将工件分拣定位抓取,自动进行工件分拣作业。该单元安装在输送线末端上方,与输送单元配合使用。
工作流程:皮带输送线运输物料至末端停止→视觉系统拍照(识别位置、颜色、形状) →将信息发送给控制器→机器人根据任务要求进行后续作业。
3、信息读写单元
图6 信息写入单元
信息读写单元采用RFID读写技术,使用高频读写器对物料底座预置的电子标签进行信息写入/读取,方便后续分类入库、信息录入等操作。
工作流程: 系统复位→手动将带有芯片的装配底座放置在读写器上→手动录入数据→完成后将装配底座放置在立库单元→机器人完成装配作业后→将成品装配搬运到读写器上→ 自动读取信息→根据读取到的信息,将工件放置到对应立库位置。
4、人机交互单元
图18 人机交互单元
人机交互单元配备工业触摸屏,可进行设备人机界面组态。在组态界面中,可实现设备的自动化控制、监测产线设备的工作/生产状态及参数、生产过程关键参数调整、设备故障报警等功能
为保证生产过程的安全,出厂触摸屏程序设置多级权限,普通用户仅可观看生产数据看板和启停操作,修改生产参数需通过身份认证登录权限用户账号,登录后才可对生产关键参数进行修改。
5、快换夹具单元
该设备所有末端工具都安装有快换装置-工具端,机器人法兰处安装有快换装置-机器人端。工具端和机器人端配合使用,可实现机器人末端工具的快速更换,大大提高了实训操作对象的兼容性。
6、工件对象
工件对象即为实训单元的工作对象,含装配套件(模拟电机装配)、码垛套件(矩形、方形)、搬运套件。组装套件共 6 套, 三种颜色设计, 每套包含3个部件, 用于模拟电机装配。
7、绘图单元
绘图模块分为平面绘图和曲面绘图两种, 主要由绘图固定支架、绘图板、不锈钢拉手、支撑杆等组成。平面绘图板上预留工件坐标系标定点,可参照此点对工业机器人工件坐标进行标定,该模块支持面轨迹描绘,同时通过手动操作,可实现多种不同角度的斜面轨迹描绘功能;曲面绘图板上采用弧形设计,可训练空间姿态示教练习。
将绘图纸打印出来,放置在绘图板上,用磁铁或夹子压紧,可以训练对机器人基本的点位示教、直线轨迹示教、曲线轨迹示教的掌握。
8、斜面搬运单元
斜面搬运操作模块主要搬运支架、搬运面板、搬运工件(三角形带数字)、不锈钢拉手等组成。搬运面板分为左右两块物料面板, 预留了10个方形和矩形放置位, 同时预留工件坐标系标定点,可参照此点对工业机器人工件坐标进行标定。
9、码垛单元
码垛模块主要由码垛支架、码垛面板、码垛工件(长形、方形)、不锈钢拉手等组成。面板预留10个长方形物料放置位和 10个正方形物料放置位, 2个码垛长方形放置位,同时预留工件坐标系标定点,可参照此点对工业机器人工件坐标进行标定。该模块可根据任务需求,完成多种模式的码垛,训练机器人相关指令编程应用。
10、控制单元
① 电源接口
② 存储卡插槽(上部保护盖下面)
③ 可拆卸用户接线连接器(保护盖下面)
④ 板载 I/O 的状态 LED
⑤ PROFINET 连接器(CPU 的底部)
控制器采用西门子 S7-1200 系列 PLC 控制器,具备数字量输入 14 点,数字 量输出 10 点, 模拟量输入 2 路, 模拟量输出 2 路, 标准的 PROFINET 以太网通讯 接口 2 个, 可实现与触摸屏、PC 等多种上位机, 进行通讯。还可使用附加模块通过 PROFIBUS、GPRS、RS485、RS232、IEC、DNP3 和 WDC 网络进行通信。
11、变位机装配单元
由气缸、固定底板、挡块、支撑杆、伺服驱动器、伺服电机、减速器、轴承、安装板和不锈钢把手等组成,用于装配底座模型定位与夹紧,工艺零部件应用的实训。采用蜗轮蜗杆减速器,配伺服驱动器和伺服电机,采用网络通讯控制,可用工业机器人/PLC驱动,该模块可与搬运模块配合使用。
工作流程: 系统复位(气缸缩回)→机器人拾取关节底座放置到装配模块上 →气缸顶出→机器人工具松开并退回到安全位置, 完成装配底座模型的定位夹紧操作,为后面其它模块装配做准备。
12、装配物料单元
电机装配模块主要由装配支架、装配面板、电机装配工件(端盖、转子、电机底座)、不锈钢拉手等组成。面板预留6个盖板工件放置位、6个转子工件放置位和6个电机底座放置位, 同时预留工件坐标系标定点,可参照此点对工业机器人工件坐标进行标定。
13、物料中转单元
物料中转单元主要由固定底板、支撑杆、安装板、废料盒组合而成,主要用于在装配过程中,指定颜色装配情况下,拾取到不需要的装配物料存放和踢废。
三、工作站整体展示
图19工作站左侧视图
图20工作站右侧视图
图21 工作站后侧视图
图22工作站正面视图
图23 工作站侧视图
四、工作站详细设备参数
|
设备名称 |
单元模块 |
部件 |
规格型号 |
数量 |
备注 |
|
工 业 机 器 人 实 训 台 |
控制单元 |
PLC可编程控制器 |
|
1 |
|
|
ABB机器人 |
|
1 |
|
||
|
供料工作站 |
固定底板 |
|
1 |
|
|
|
不锈钢拉手 |
|
2 |
|
||
|
支撑架 |
|
1 |
|
||
|
安装板 |
|
1 |
|
||
|
气缸 |
|
1 |
|
||
|
推杆 |
|
1 |
|
||
|
光纤传感器 |
|
1 |
|
||
|
有机材质料筒 |
|
1 |
|
||
|
输送单元 |
固定底板 |
|
1 |
|
|
|
不锈钢拉手 |
|
2 |
|
||
|
支撑架 |
|
4 |
|
||
|
皮带 |
|
1 |
|
||
|
轴承 |
|
1 |
|
||
|
主动轮 |
|
1 |
|
||
|
从动轮 |
|
1 |
|
||
|
驱动电机 |
|
1 |
|
||
|
旋转编码器 |
|
1 |
|
||
|
光电开关 |
|
2 |
|
||
|
导流板 |
|
1 |
|
||
|
视觉检测单元 |
固定底板 |
|
1 |
|
|
|
光轴 |
|
1 |
|
||
|
连接块 |
|
1 |
|
||
|
相机安装板 |
|
1 |
|
||
|
光源安装板 |
|
1 |
|
||
|
相机 |
|
1 |
|
||
|
镜头 |
|
1 |
|
||
|
光源 |
|
1 |
|
||
|
线缆 |
|
1 |
|
||
|
视觉控制器 |
|
1 |
|
||
|
信息读写单元 |
固定底板 |
|
1 |
|
|
|
支撑架 |
|
1 |
|
||
|
RFID读写器 |
|
1 |
|
||
|
人机交互单元 |
触摸屏安装座 |
|
1 |
|
|
|
触摸屏伸缩调节杆 |
|
1 |
|
||
|
西门子KTP700或KTP900 |
|
1 |
|
||
|
快换夹具单元 |
固定底板 |
|
1 |
|
|
|
不锈钢拉手 |
|
2 |
|
||
|
支撑架 |
|
2 |
|
||
|
快换装置 |
|
4 |
|
||
|
夹爪气缸 |
|
2 |
|
||
|
吸盘 |
|
1 |
|
||
|
夹持工具 |
|
1 |
|
||
|
工作对象 |
装配套件 |
|
1 |
|
|
|
码垛套件 |
|
1 |
|
||
|
搬运套件 |
|
1 |
|
||
|
组装套件 |
|
1 |
|
||
|
绘图单元 |
固定底板 |
|
1 |
|
|
|
不锈钢拉手 |
|
2 |
|
||
|
支撑架 |
|
2 |
|
||
|
平面绘图板 |
|
1 |
|
||
|
曲面绘图板 |
|
1 |
|
||
|
斜面搬运单元 |
固定底板 |
|
1 |
|
|
|
不锈钢拉手 |
|
2 |
|
||
|
支撑架 |
|
2 |
|
||
|
搬运面板 |
|
1 |
|
||
|
搬运工件 |
|
1 |
|
||
|
码垛单元 |
固定底板 |
|
1 |
|
|
|
不锈钢拉手 |
|
2 |
|
||
|
支撑架 |
|
2 |
|
||
|
码垛面板 |
|
1 |
|
||
|
码垛工件 |
|
1 |
|
||
|
变位器单元 |
固定底板 |
|
1 |
|
|
|
挡块 |
|
2 |
|
||
|
不锈钢拉手 |
|
2 |
|
||
|
支撑杆 |
|
2 |
|
||
|
伺服驱动器 |
|
1 |
|
||
|
伺服电机 |
|
1 |
|
||
|
减速器 |
|
1 |
|
||
|
轴承 |
|
1 |
|
||
|
安装板 |
|
1 |
|
||
|
装配物料单元 |
固定底板 |
|
1 |
|
|
|
不锈钢拉手 |
|
2 |
|
||
|
支撑架 |
|
2 |
|
||
|
装配面板 |
|
1 |
|
||
|
电机装配工件 |
|
1 |
|
||
|
物料中转单元 |
固定底板 |
|
1 |
|
|
|
不锈钢拉手 |
|
2 |
|
||
|
支撑架 |
|
2 |
|
||
|
|
废料盒 |
|
1 |
|






